| 研究目標 工廠與倉儲環境中,貨物自燃、設備過熱、管線氣體洩漏及設備異常運作等因素,皆可能導致火災或工安事故。如何即時掌握環境狀態並及早偵測潛在異常,成為智慧巡檢機器人系統的重要研究議題。本研究旨在發展具備環境感知能力之語義 SLAM 技術,使機器人能在建構環境地圖的同時,理解場域中設備與空間區域之語意資訊,並整合多模態環境感測資料以提升環境監測能力。 此研究將整合影像、溫度量測、氣體濃度與聲學訊號等感測資料,建構具環境狀態資訊的三維語意地圖。透過將感測資料與機器人位置資訊對齊,可在同一座標系統中整合不同來源的環境資訊,使機器人理解設備位置、區域功能與環境狀態之間的關聯性,進而提升對場域狀況的整體感知能力。此外,本研究亦將建立結合環境狀態資訊的語意地圖,使機器人在巡檢過程中能同步掌握設備溫度變化、氣體濃度以及潛在異常聲源等資訊。透過整合上述環境感測結果,期望提升巡檢機器人在複雜工業場域中對潛在異常事件的即時偵測能力,並支援後續的巡檢決策與安全監控。 |
||
|
||
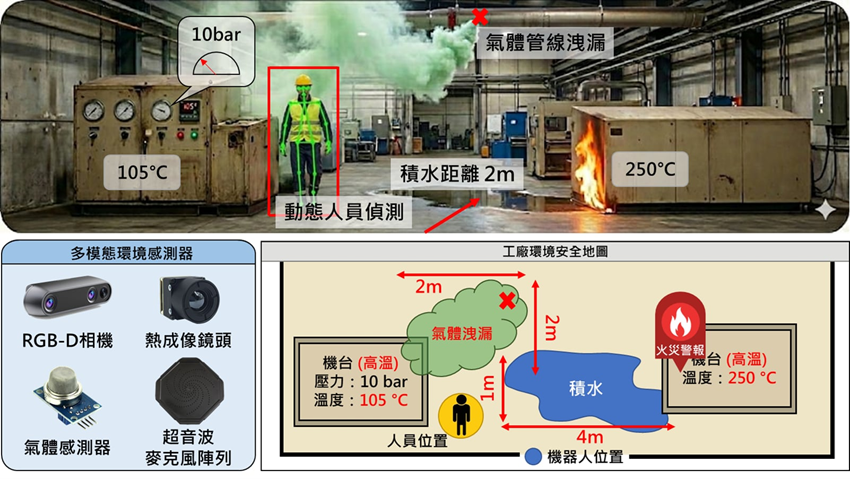
圖1、具環境感知之語意地圖 |
||
|---|---|---|